
Multi-armed head-over-hang moving assistant robot MKAR (German)
Optimal solution for assisted and program-controlled robotic surgery systems
Problem Description:
The positive evolution of initially manual, minimally invasive surgical practices has resulted in recent years with increasingly widespread applications of technically assisted laparoscopic systems.
The two main characteristics of current technical surgical systems are:
(a) the way the robotic arms are positioned with respect to the patient and how they are positioned in space while doing so:
The current technical surgery systems are positioned on the floor, tilted above the patient resulting in limited accessibility to the patient from some sides.
(b) The number of robotic arms:
Here you can find mostly/ maximum 2 up to 4 robotic arms guided by the surgeon.
The new/ optimal solution "multi-armed assistance robots MKAR":
The new/optimal solution of the execution of the surgical assistance robots, the multi-armed and head-over-hang moving assistance robots (MKAR) offer the following improvements:
- A previously non-existent freedom of movement of the MKAR assistant robot itself is achieved, with an optimal positioning of the arms during the operations.
- At the same time, the accessibility of the doctors and assistants working in the space around the robot to the patient is optimal, as there is no body or frame in the way.
- In addition, it is much easier to move the MKAR in the operating room itself and to other operating rooms, thus maximizing the efficiency of the system.
The new multi-arm design (4, 6, 8 or more arms) of the MKAR:
- optimally organized work (operating/assisting) of the surgeons and the assistants is made possible.
- synchronous operating/assisting is possible (e.g. 2 surgeons at the same time).
With the multi-armed head-over-hang moving assistant robot (MKAR), the use of appropriately suitable intelligent grippers and intelligent surgical instruments, together with appropriately programmed local and higher-level system controls, should and can minimize patient hazards and at the same time maximally increase the safety and efficiency of surgical interventions.
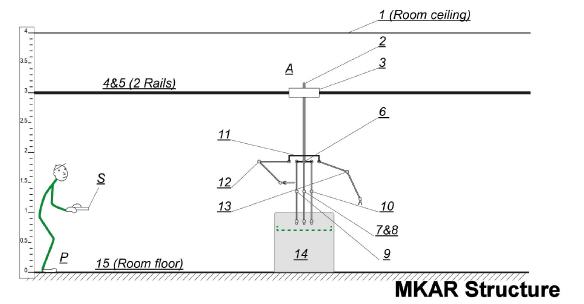
The MKAR system consists of a suspended MKAR installed in an operating room (1/ room ceiling - 15/ room floor), which is mobile supported by a lifting rod (2) and an MKAR transport base (3, with the wheels not visible here) and by two rails (4, 5) attached to the room ceiling (1). It consists of a first MKAR shoulder-cross joint (6) on which the 4 main kinematic articulation arms (7 + 8 and 9 +10) are suspended. The main articulation arms each consist of an upper arm joint, the upper arm, elbow joint, forearm, gripper joint, gripper holder and a gripper or surgical instrument/ also intelligent surgical instrument designed according to the task to be performed.
In the figure shown, the second MKAR shoulder-cross joint (11) carries only 2 kinematic assistance articulation arms (12 + 13), each consisting of an upper arm joint, the upper arm, elbow joint, forearm, gripper joint, gripper holder and a gripper designed according to the task to be performed.
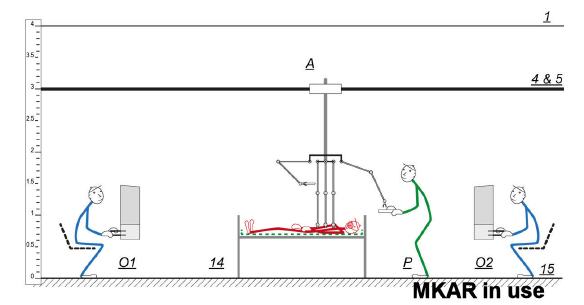
The work/operation of the MKAR is performed here by two surgeons using the MKAR control systems (O1 and O2) and the main articulated arms on a patient in the bedside (14) the surgical procedure. The 2 assistant articulation arms (12, 13) can either be controlled/operated by the operators (O1 and O2) themselves or by the nurse (P).
Advantages of the assistance robots KAR:
- Accessibility to the patient from all sides guaranteed
- Easy moving of the MKAR to another operating site
- Synchronous operating/assisting and maximum efficiency
- MKAR the optimal solution for assisted and program-controlled robotic surgery systems
- Innovative product with unique features, patent protected
| Leaflet | Download [304 KB] |
Patent Buyer or Licencee wanted!
#Upside down
#Hanging
#Moving
#assistance
#robot
#MKAR
#solution
#load
#capacity
#staff
#medicine
#care